红外循迹模块

1路循迹模块,用于小车走黑线,数字信号输出,电位器用于调节灵敏度
特点
- 工作电压:3-6V
- 输出信号:数字电平0或1,
- 灵敏度调节方式:精密电位器
- 感应距离范围:2mm~20mm
功能介绍
- 传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮。
- 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
- 传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色反射少,读取数值小,探测距离也小,白色多,读取数值大;小面积物体,读取数值小,检测距离小, 大面积读取数值大。
准备材料
电池
红外循迹模块
杜邦线
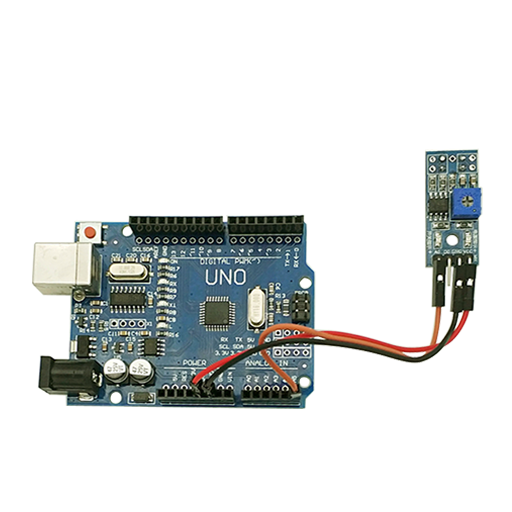
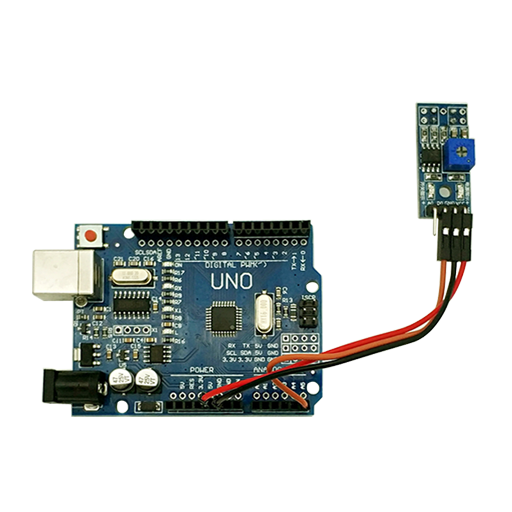
连接图
Arduino 代码
1.模拟输出,使用AO
int PinAO = A5;
int PinLed = 13;
void setup()
{
pinMode(PinLed, OUTPUT);
Serial.begin(9600);
}
void loop()
{
int sensorValue = analogRead(PinAO);
digitalWrite(PinLed, HIGH);
delay(sensorValue);
digitalWrite(PinLed, LOW);
delay(sensorValue);
Serial.println(sensorValue, DEC);
}
2.数字输出,使用DO
int PinAO = A5; // 定义寻线传感器接口
int PinLed = 13; // 定义LED 接口
int Val = 0; // 定义数字变量val
void setup()
{
pinMode(PinLed, OUTPUT); // 定义LED 为输出接口
pinMode(PinAO, INPUT); // 定义寻线传感器为输出接口
Serial.begin(9600);
}
void loop()
{
Val = digitalRead(PinAO); // 将数字接口3的值读取赋给val
if (Val == HIGH) // 当寻线传感器检测有信号时,LED 闪烁
{
digitalWrite(PinLed, LOW);
Serial.println("HIGH");
}
else
{
digitalWrite(PinLed, HIGH);
Serial.println("LOW");
}
}